Inspection of submerged silos or tanks using the AVEXIS®
Utilising innovative robotic technology, it is possible to inspect underwater structures in silos or tanks with small cross-section access ports or confined spaces.
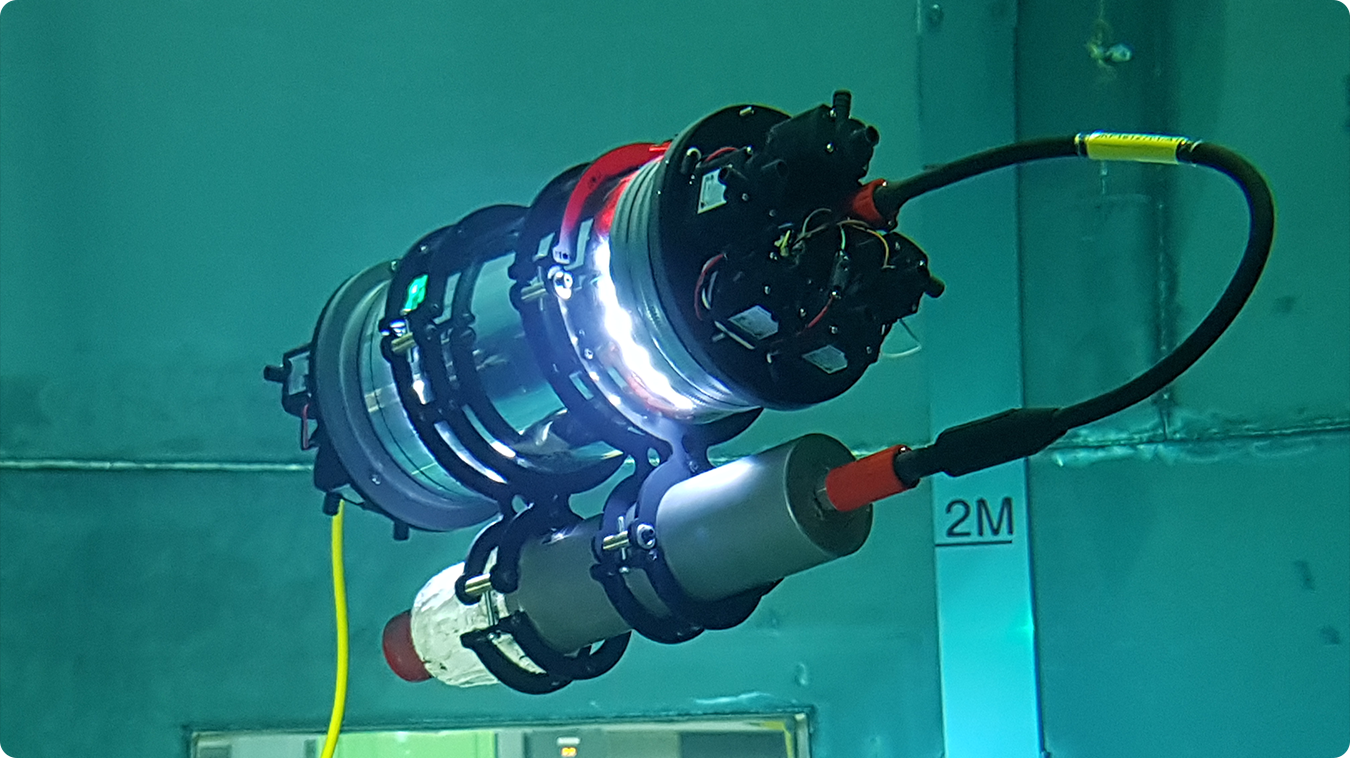
The AVEXIS® is a submersible ROV, with an outer diameter of less than 6” or 150mm, allowing it to be passed through a small access port into a larger tank or silo, and a payload of 1kg, enabling a range of different sensors to be attached and 3 degrees of freedom for increased manoeuvrability.
The stock, in-built sensors normally consist of a high resolution camera with underwater lighting, twinned with a radiation sensor, offering inspections of submerged nuclear storage facilities, silos or collapsed structures. Where inspection/maintenance tasks are normally expensive, invasive and time-consuming.
Various environmental sensors can also be added to the submersible, including radiation sensors, thermometers, ultrasonic thickness gauges, pH meters and sonars. The AVEXIS has been demonstrated in Japan, as part of a collaboration developing techniques to decommission the Fukushima Nuclear Power Plant, and is constantly being developed to improve its capabilities.
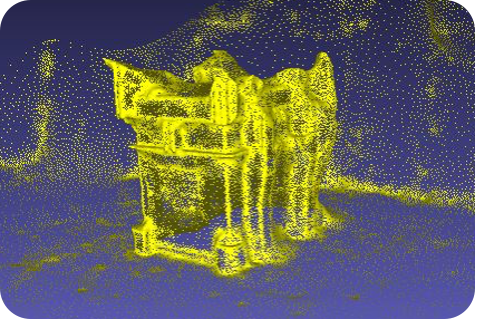
Complimentary localisation and positioning systems are also under development to improve on current acoustic techniques that do not work well in cluttered, enclosed environments.