Utilising innovative robotic technology, it is possible to inspect the structures of clean-water underground reservoir structures.
This reduces manned-entries in confined spaces, reducing the need for divers in hazardous spaces, whilst also improving the efficiency of maintenance tasks.
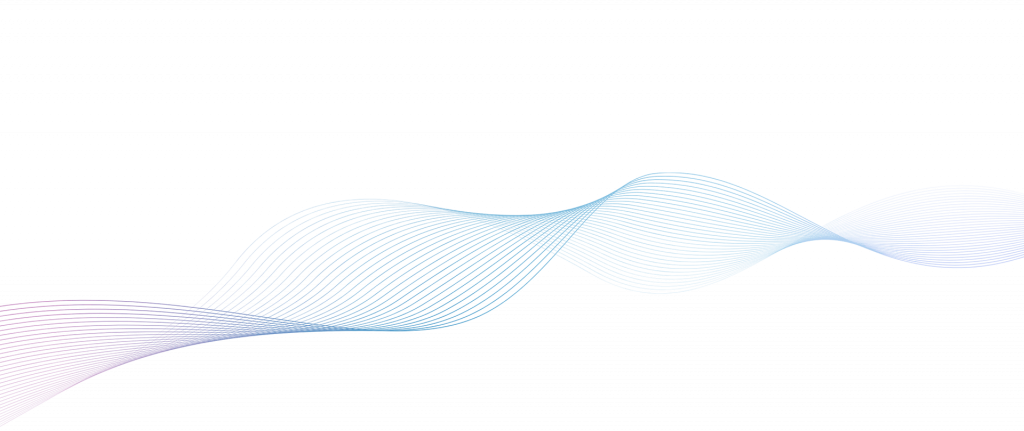
MallARD robotic boat system
Using the autonomous, robotic boat system, MallARD, it is possible to navigate across the surface of the water within the reservoir. A repetitive “lawn-mower” type pattern can then be programmed into the robotic boat, which is resistant to currents and obstacles in its path, allowing the system to travel up and down the entire length of the reservoir, adapting the defined path based on structures in its way.
Using laser-scanning and robust simultaneous localisation and mapping software, the robotic system knows exactly where it is within the environment, offering reliable and trustworthy data to inspection or survey engineers.
A high-resolution camera and various environmental sensors placed as a payload on the system, can highlight areas of concern in the roof structure. Such as development of rust, cracks or blemishes that could affect the cleanliness of the water, leading to water wastage and the need to take the reservoir out of service.
If you would like to know more about the opportunity of using robotic platforms to inspect confined spaces, please click here to get in touch!